1 感知机
1.1 简介
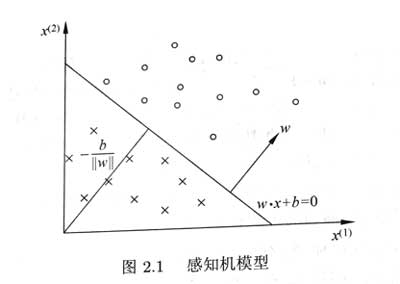
感知机是二分类线性分类模型,感知机对输入空间中将实例划分为正负两类的分离超平面,属于判别模型。使用基于误分类的损失函数,利用梯度下降法对损失函数进行最小化。
感知机:
1.2 学习策略
损失函数的自然选择是误分类点的总数(但这样$w,b$不是连续可导函数,不易优化)
故采用误分类点到超平面$S$的总距离:
由于对于一个误分类的数据$(x_i,y_i)$来说:
因此感知机的损失函数是(忽略常数):
1.3 随机梯度下降
一次随机选取一个误分类点使其梯度下降。
损失函数的梯度:
选取一个误分类点$(x_i,y_i)$进行更新w,b。
1.4 感知机算法过程
输入:训练数据集$T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{N}, y_{N}\right)\right\}$,其中$x_{i} \in \mathcal{X}=\mathbf{R}^{n}, y_i \in y=\{-1,+1\}, i=1,2, \cdots, N$ 。学习率 $\alpha$,
输出: 求解感知机模型 $f(x) = sign(w \cdot x + b)$
(1) 选取初值$w_0,b_0$
(2) 在训练数据中选取数据 $(x_i,y_i)$
(3) 如果$y_{i}\left(w \cdot x_{i}+b\right) \leqslant 0$ ,则 $w = w + \alpha y_i x_i, b = b + \alpha y_i$
2 K近邻KNN
2.1 简介
KNN是一种基本的分类与回归方法。KNN法假设给定一个训练数据集,其中实例类别已定。分类时,对新的实例根据其K个最近邻的训练实例的类别,通过多数表决来预测。
基本要素:K值的选择,距离度量,分类决策规则
2.2 K近邻法算法
输入:训练数据集$T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{N}, y_{N}\right)\right\}$,其中 $x_{i} \in \mathcal{X}=\mathbf{R}^{n}, y_i \in y=\{c_1,c_2,\cdot \cdot, c_k\}, i=1,2, \cdots, N$
输出:新实例 $x$ 所属的类别 $y$
(1) 根据给定的距离度量,在训练集中找出与x最临近的k个点,涵盖这k个点的x的邻域记作$N_k(x)$
(2) 在$N_k(x)$中根据分类决策规则(如多数表决)来判定x的类别y
$I$是指示函数,当$y_i = c_j$ 时为1。
2.3 距离度量
距离是两个点相似度的反映。设特征空间$\mathcal{X}$是n维实数向量空间$\mathbf{R}^{n}$,
则P范数距离是:
p=1 曼哈顿距离,p=2 欧氏距离,p=$\infty$,是切比雪夫距离,各个坐标距离的最大值。
2.4 K值的影响
1,k较小时,使用较小的邻域中的训练实例进行预测,“学习”的近似误差减小,但是估计误差增大。即预测结果对邻近点非常敏感,如果邻近的点是噪声则会预测出错(容易过拟合)。
2.5 分类决策规则
一般多数表决。误分类的概率是:
则误分类率是:
2.6 k-d tree
为了提高k近邻的搜索效率。用特殊的结构存储训练数据,减少计算距离的次数。构造kd树相当于不断地用垂直于坐标轴的超平面将k维空间切分(递归),构成一系列的k维超矩形矩阵区域。(李航书P53)
搜索:首先找到包含目标点的叶节点,然后从该叶节点出发依次回退到父节点,不断查找与目标点最邻近的节点。当确定不存在更近的结点时终止。
Reference
1,《统计学习方法》李航

